Ubiqui, avanzati e impressionanti
Siamo certi di sapere a che livello sia arrivata la presenza dei robot in ogni settore? Voglio presentare alcuni esempi straordinari in circolazione, scoprendo di che cosa sono capaci. Fatta eccezione per i robot Mars, i produttori di robot sembrano prediligere le forme umane e animali, per la loro adattabilità, al contrario dei robot progettati per uso industriale e destinati a un singolo impiego ripetitivo.
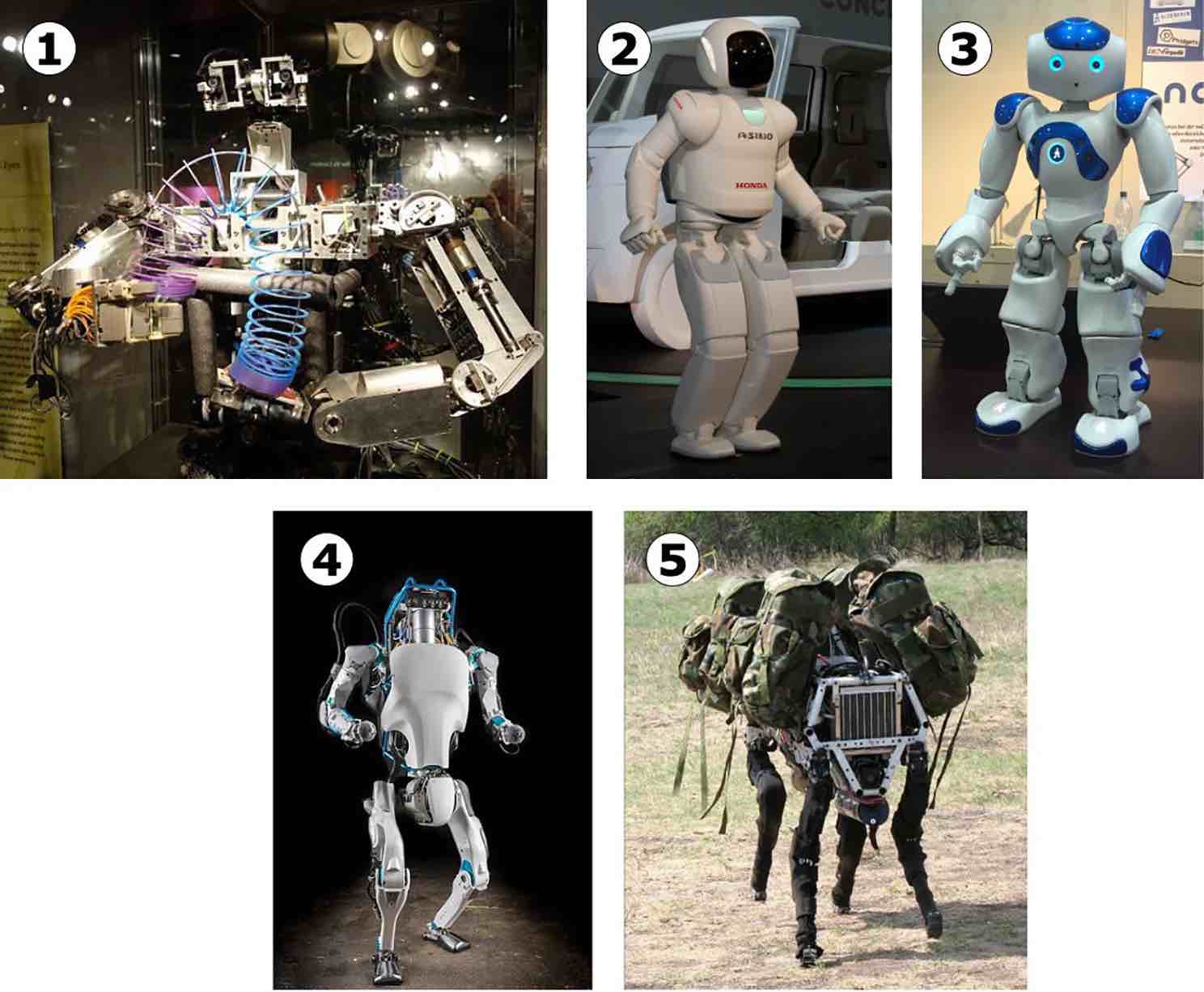
Una selezione di robot simili a esseri umani o ad animali. Crediti: 1. Immagine di dominio pubblico. 2. Immagine di Morio, sotto CC BY-SA 3.0: ASIMO. 3. Immagine di dominio pubblico. 4. Immagine sotto CC BY-SA 4.0: Atlas di Boston Dynamics, di Kansascity.com. 5. Immagine di dominio pubblico.
Ciò che questi robot hanno in comune è che cercano di emulare gli esseri umani o gli animali nei seguenti modi.
- Il robot 1 è Cog del Massachusetts Institute of Technology. È stato un tentativo di emulare un essere umano in termini di movimenti e sensori.
- Il robot 2 è ASIMO di produzione Honda, e cammina e parla un po’ come un essere umano. Le due telecamere di ASIMO gli consentono di evitare gli oggetti, ma è dotato anche di gesti e del riconoscimento facciale e di un sensore di distanza per rilevare il pavimento. Segue i segni sul pavimento grazie a sensori a infrarossi. ASIMO accetta comandi vocali in inglese e giapponese.
- Il robot 3 è Nao di Softbank Robotics. Questo simpatico robot alto 58 cm è stato progettato per l’apprendimento e il gioco, ed è programmabile dagli utenti. Ha sensori per rilevare il proprio movimento, si accorge se sta cadendo e i suoi sensori di distanza a ultrasuoni gli permettono di evitare urti. Nao utilizza altoparlanti e un microfono per l’elaborazione vocale. Ha più telecamere per eseguire operazioni simili a quelle di ASIMO.
- Il robot 4 è Atlas di Boston Dynamics. È veloce a spostarsi su due gambe e ha movimenti dall’aspetto naturale. Ha un array di radar laser (LIDAR), che utilizza per rilevare ciò che lo circonda, in modo da pianificare i propri movimenti ed evitare collisioni.
- Il robot 5 è BigDog di Boston Dynamics, un robot quadrupede. Può camminare e correre. È uno dei robot a quattro gambe più stabili, rimane in piedi anche se viene spinto o urtato ed è in grado di camminare sul ghiaccio.
Qualcuno lo ha definito “due ubriachi che trasportano un divano”, ma la stabilità di BigDog è invero notevole.
I rover su Marte
I robot per Marte sono progettati per funzionare su un altro pianeta, dove non c’è possibilità di intervento umano, pertanto sono particolarmente solidi. Le nuove release del software possono essergli inviate tramite un link remoto, poiché è poco pratico inviare ogni volta una persona su Marte con un monitor e una tastiera. Il rover è headless, senza testa.

Il rover Curiosity della NASA a Glen Etive, su Marte. Crediti: NASA/JPL-Caltech/MSSS.
I rover inviati su Marte si spostano su ruote invece di usare gambe, poiché stabilizzare un robot su ruote è molto più semplice: vi sono meno cose che possono andare storte. Ogni ruota sui rover Mars ha un proprio motore. Le ruote sono disposte per fornire la massima presa e per dare tutta la stabilità necessaria per affrontare il terreno roccioso di Marte e la sua bassa gravità.
Leggi anche: Robot: costruirli e programmarli in 5 risposte
Il rover Curiosity è stato depositato su Marte con la sua videocamera sensibile ripiegata. Dopo l’atterraggio, la videocamera è stata estesa e posizionata grazie a servomotori. La videocamera può essere puntata utilizzando un meccanismo di panoramica e inclinazione (pan and tilt). Ha bisogno di rilevare nel migliore dei modi il paesaggio di Marte, inviando poi filmati e immagini alla NASA.
Robot domestici
Molti robot si sono già infiltrati nelle nostre case. Per noi è difficile considerarli robot, perché, a prima vista, non hanno niente di speciale, sono perfino banali. Tuttavia, sono più sofisticati di quanto possa sembrare.
La lavatrice
È presente in ogni casa e viene utilizzato quotidianamente, con un flusso costante di vestiti da lavare, sciacquare e strizzare. Ma… anche lei è un robot? Guardiamo il diagramma a blocchi di una lavatrice.
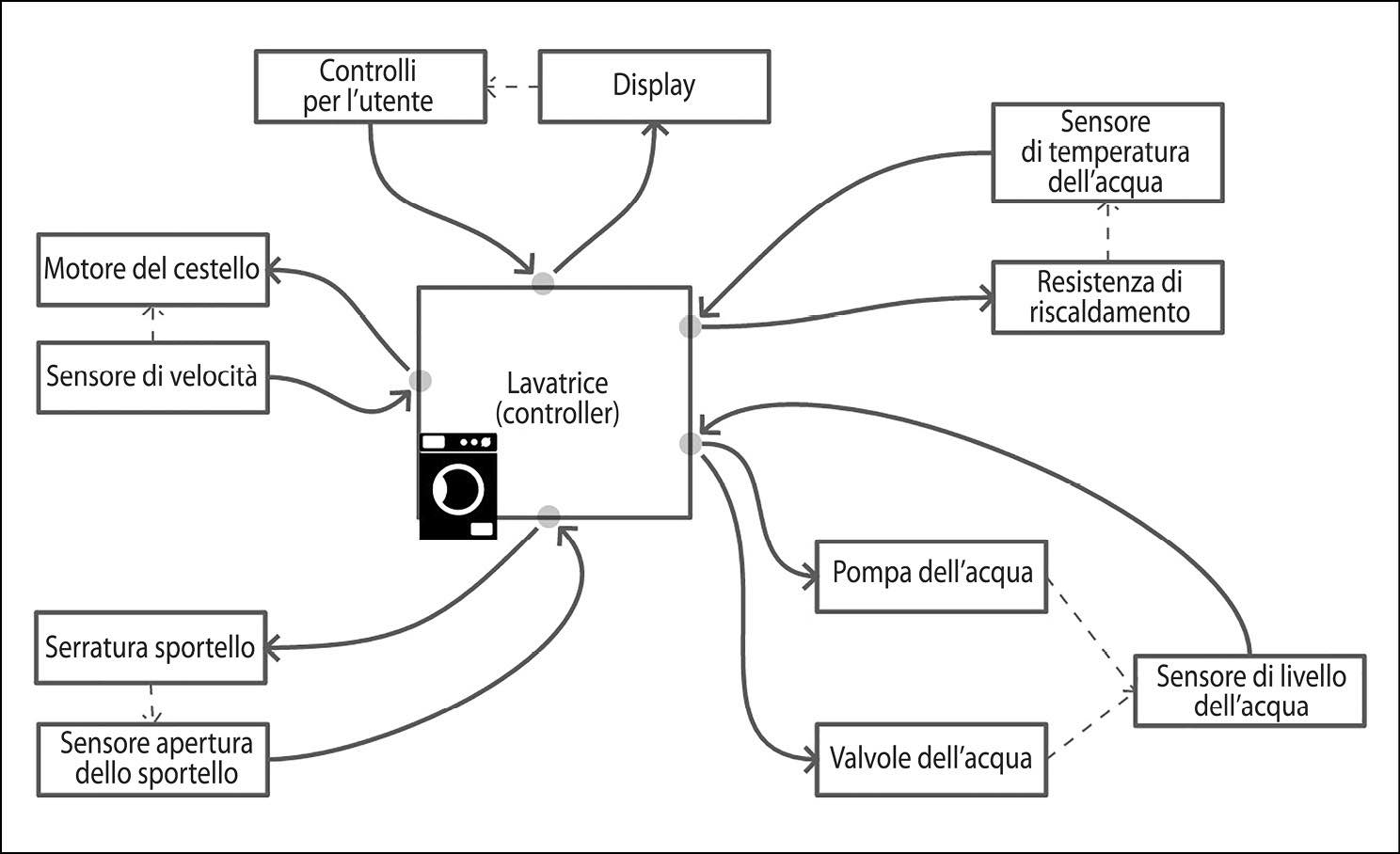
I componenti di una lavatrice.
C’è un controller centrale collegato al display con le manopole per selezionare i programmi. Le linee che escono dal controller sono i suoi output. Le linee che entrano nel controller portano i dati provenienti dai sensori. Le linee tratteggiate dagli output ai sensori creano un circuito di azioni di output che opera sul mondo reale, provocando modifiche rilevate poi dai sensori. Questo è il concetto di feedback, essenziale nella robotica.
La lavatrice utilizza il display e i pulsanti/manopole per consentire all’utente di scegliere le impostazioni e di vederne lo stato. Dopo aver premuto il pulsante di avvio, il controller controlla il sensore dello sportello e si rifiuterà di avviarsi se lo sportello è aperto. Una volta che lo sportello è chiuso e il pulsante di avvio è premuto, verrà emesso un output per bloccare lo sportello. Successivamente, la lavatrice utilizza la resistenza di riscaldamento, le valvole e la pompa per riempire il cestello con l’acqua e poi la riscalda, utilizzando i feedback dei sensori per regolare il livello dell’acqua e la temperatura.
Ogni processo può essere rappresentato da un insieme di istruzioni come le seguenti, che riempiono il cestello e mantengono riscaldata l’acqua.
avvia pompa-acqua
accendi resistenza-riscaldamento
while acqua not piena and acqua not calda.
if acqua piena, then
ferma pompa-acqua
if acqua calda, then
spegni resistenza-riscaldamento
else
accendi resistenza-riscaldamento
Notiamo l’else, che opera sempre nel caso in cui la temperatura dell’acqua scenda leggermente sotto la temperatura corretta. La lavatrice, quindi avvia la sequenza di rotazione del cestello: giri lenti, giri veloci, rilevamento della velocità per soddisfare i criteri impostati. Poi svuoterà il cestello dell’acqua, sciacquerà e poi strizzerà i vestiti, infine si fermerà e sbloccherà la serratura dello sportello.
La lavatrice è, a tutti gli effetti, un robot. Una lavatrice ha sensori e output per influenzare il suo ambiente. L’elaborazione le consente di seguire un programma e di utilizzare i suoi sensori con feedback per raggiungere e mantenere determinate condizioni. Un riparatore di lavatrici può sicuramente essere considerato un professionista della robotica.
Altri robot domestici
Una caldaia per il riscaldamento centralizzato a gas è dotata di sensori, pompe e valvole. La caldaia utilizza meccanismi di feedback per mantenere costante la temperatura della casa, per controllare il flusso d’acqua per il riscaldamento e il flusso di gas e per garantire che la fiammella pilota rimanga accesa. La caldaia è automatica e ha molte caratteristiche simili a quelle di un robot, ma è statica e non può essere facilmente adattata ad altri scopi. Lo stesso si potrebbe dire per altri elettrodomestici, come i ventilatori e le stampanti intelligenti.
I ventilatori intelligenti utilizzano sensori per rilevare la temperatura e l’umidità dell’ambiente e la qualità dell’aria, e il loro output regola la velocità della ventola e l’attivazione degli elementi riscaldanti.
Altre macchine presenti in casa, come il forno a microonde, per esempio, hanno solo il timer, non prendono decisioni e sono troppo semplici per essere considerate robot.
Forse l’esempio più ovvio di robot domestico è il robot aspirapolvere.

Un robot aspirapolvere: PicaBot. Crediti: Handitec, pubblico dominio.
Robot nell’industria
Un altro luogo in cui i robot sono comunemente presenti è l’industria. I primi robot davvero utili sono stati utilizzati nelle fabbriche e sono lì da molto tempo.
Bracci robotici
I bracci robotici vanno dai minuscoli e delicati robot per girare le uova, a mostri colossali in grado di spostare interi container. I bracci dei robot tendono a utilizzare motori passo-passo e servomotori. La maggior parte dei bracci robotici industriali (per esempio, i robot di saldatura ABB) segue uno schema di movimenti predeterminato e non svolge alcun processo decisionale. Esistono tuttavia sistemi più intelligenti e basati su sensori, come l’impressionante Baxter di Rethink Robotics. Baxter è un robot collaborativo progettato per lavorare al fianco degli esseri umani.
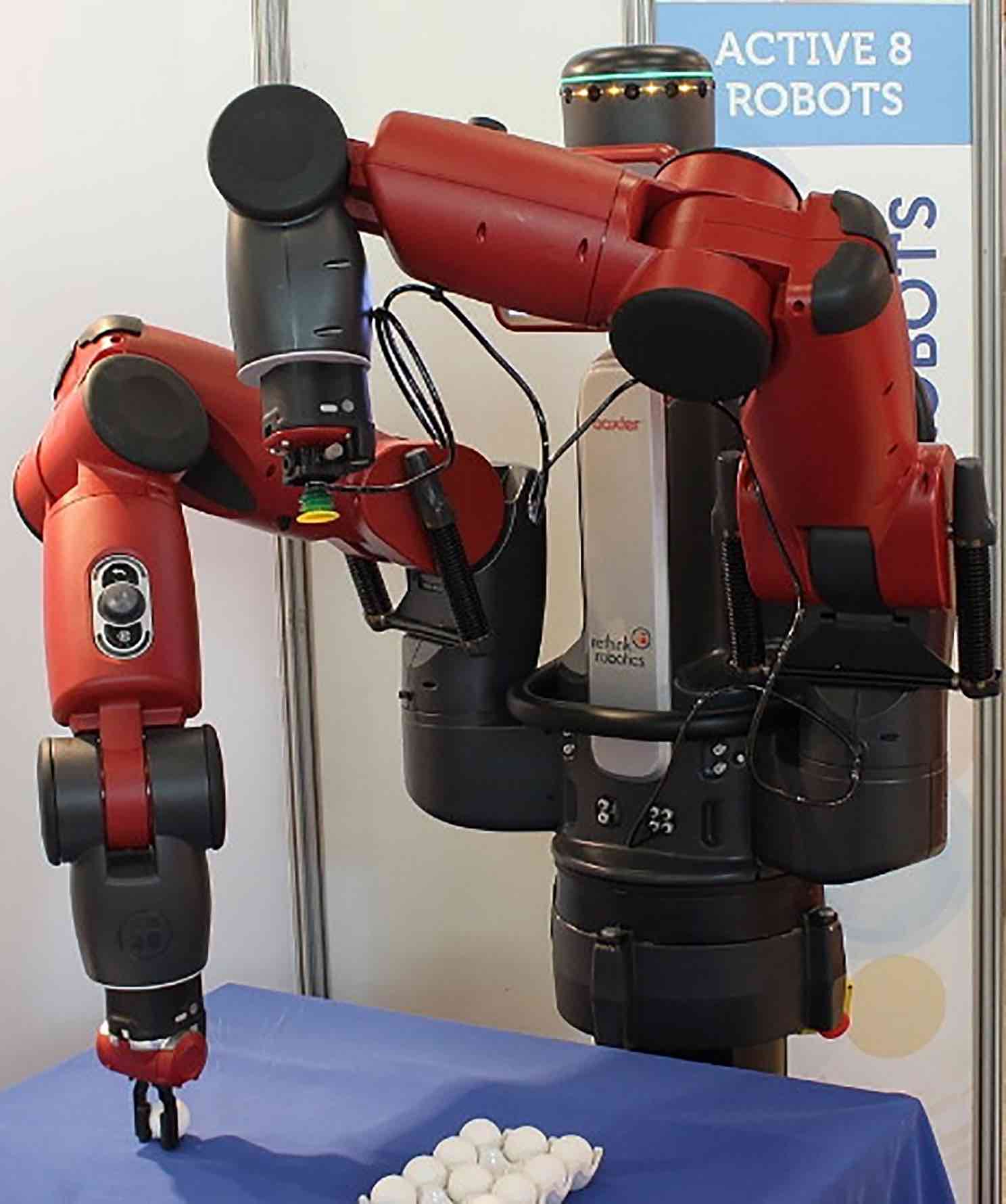
Baxter di Rethink Robotics. Crediti: Baxter all’Innorobo di © Xavier Caré / Wikimedia Commons [CC BY-SA 4.0].
Non è sicuro per un essere umano lavorare accanto a molti bracci robotici: potrebbe subire incidenti. Occorrono gabbie e segnali di avvertimento tutto attorno al robot. Non è così con Baxter: è in grado di percepire un essere umano ed evitarlo o fermarsi in sicurezza. Nell’immagine precedente, questi sensori sono visibili intorno alla testa. I sensori nei bracci e le articolazioni morbide gli consentono, inoltre, di percepire e reagire alle collisioni.
Baxter ha un meccanismo di addestramento e ripetizione che consente ai lavoratori di programmarlo a svolgere un’attività. Utilizza dei sensori per rilevare le posizioni delle articolazioni durante l’addestramento o la riproduzione dei movimenti.
Robot da magazzino
Un altro tipo di robot comunemente utilizzato nell’industria è rappresentato da quei sistemi che spostano oggetti all’interno di una fabbrica o di un magazzino.
I robot più piccoli per la movimentazione di oggetti, come Intellicart, utilizzano sensori per seguire le linee sul pavimento, per rilevare magneticamente i cavi che corrono sotto il pavimento o per seguire segnali luminosi, come ASIMO. Questi sistemi in grado di seguire una linea utilizzano spesso ruote, perché sono semplici da gestire e aiutano a creare piattaforme stabili.

Sistemi robotici da magazzino: Stingray di TGWmechanics [CC BY-SA 3.0] e Intellicart di Mukeshhrs (pubblico dominio).
Robot in ambito competitivo, educativo e hobbistico
I robot più divertenti sono quelli creati da costruttori dilettanti. Questo è uno spazio estremamente dinamico.
La robotica ha sempre avuto un certo spazio nel campo educativo, dove i costruttori accademici utilizzavano i robot come piattaforme di apprendimento e sperimentazione. Molte iniziative commerciali sono nate proprio in questo contesto. I robot universitari sono spesso frutto di attività di gruppo, con impiego di attrezzature hi-tech.
Kismet è stato creato al MIT alla fine degli anni Novanta. Da esso derivano diversi robot hobbistici. All’epoca era rivoluzionario, dal momento che utilizzava motori per controllare i movimenti del viso, imitando le espressioni umane. OhBot, un kit low cost per hobbisti che utilizza servomotori, si basa su Kismet. OhBot si collega a un Raspberry Pi, e utilizza il riconoscimento vocale e una videocamera per creare un volto convincente.
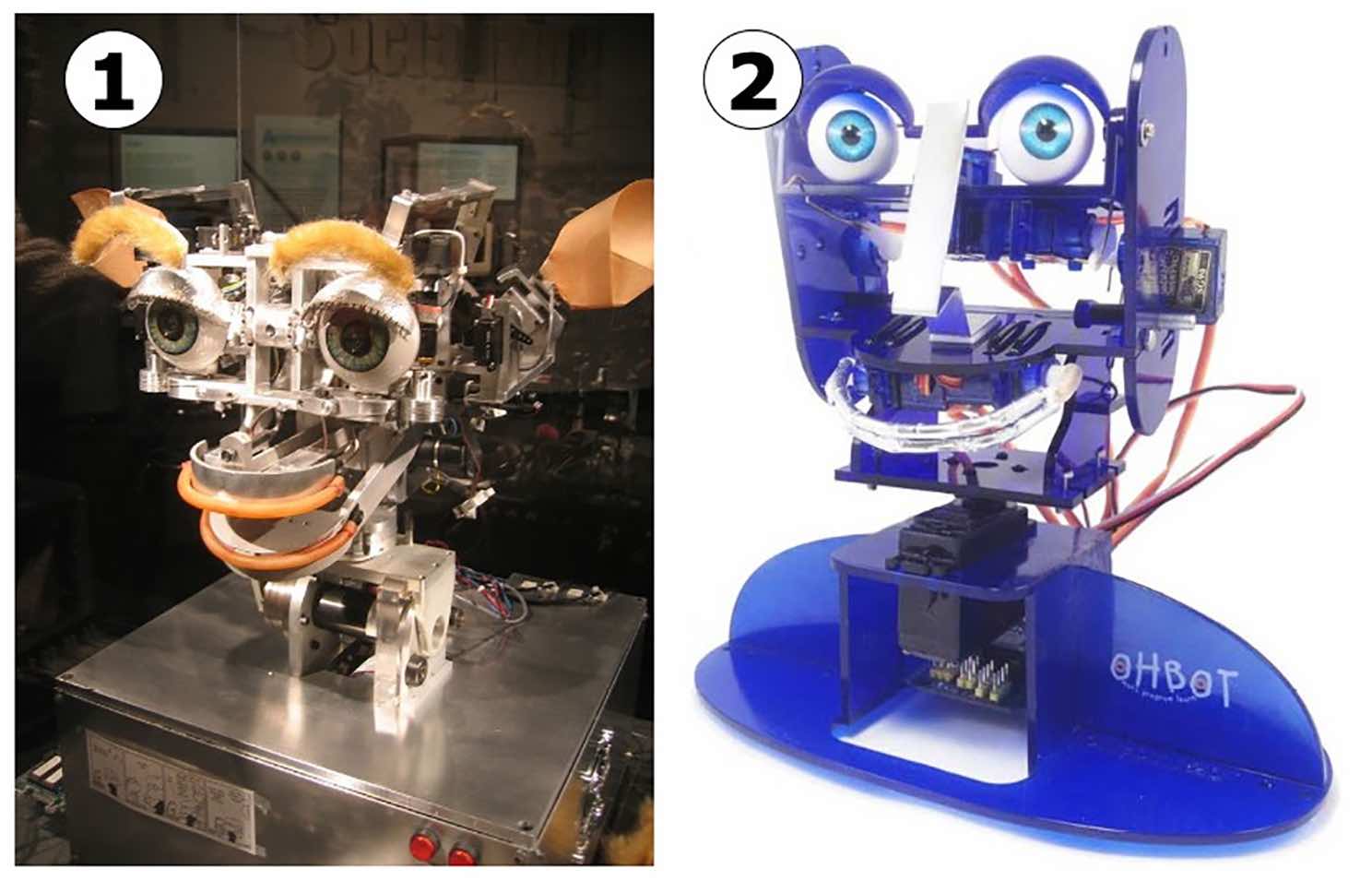
Kismet [Jared C. Benedict, CC BY-SA 2.5] e OhBot [AndroidFountain [CC BY-SA 4.0].
La robotica hobbistica è fortemente legata alla community software/hardware open source, facendo uso di siti come GitHub per condividere progetti e codice, cosa che porta allo sviluppo di ulteriori idee. I robot hobbistici possono essere creati a partire da kit disponibili su Internet, apportando modifiche e integrazioni. I kit coprono un ampio ventaglio di complessità, dalle semplici basi a tre ruote ai kit di droni, agli esapodi. Vengono venduti con o senza elettronica inclusa. Io ho usato un kit esapode per costruire SpiderBot, con lo scopo di esplorare il movimento tramite zampe.
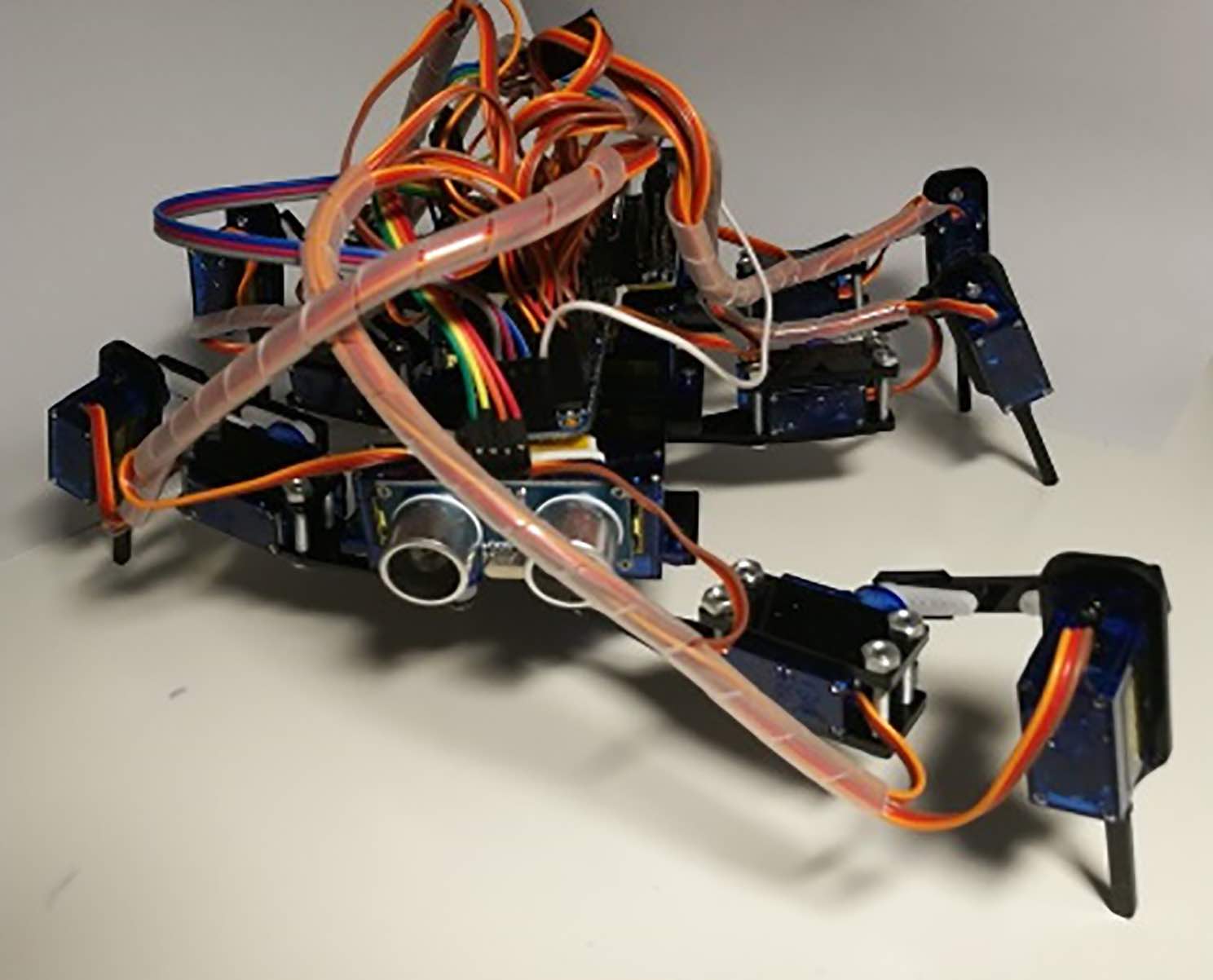
Spiderbot, realizzato da me, basato su un kit. Il controller è un ESP8266 con un servocontroller Adafruit 16.
Skittlebot è la mia creazione che ho portato a Pi Wars 2018, costruito utilizzando giocattoli e trasformando, in pratica, un escavatore telecomandato in una piattaforma robotica. Pi Wars è una sfida fra robot autonomi basati su Raspberry Pi, con sfide sia manuali sia autonome. C’erano esempi dall’aspetto molto bello e ricchi di attività di ingegneria. Skittlebot utilizza tre sensori di distanza per evitare le pareti e una fotocamera per trovare gli oggetti colorati.
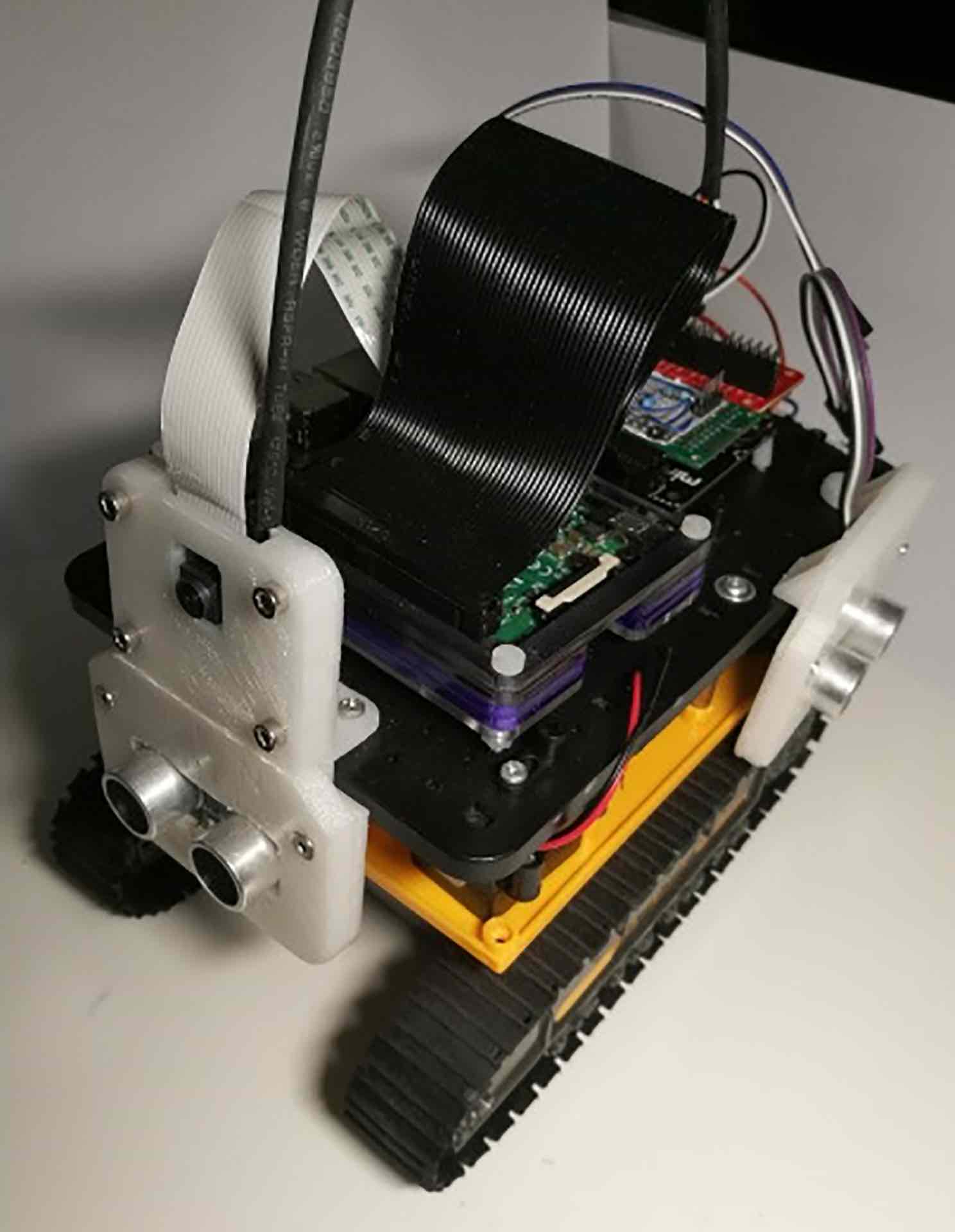
Skittlebot: il mio robot per Pi Wars 2018, basato su un giocattolo.
Alcuni robot hobbistici sono costruiti partendo da zero, utilizzando stampa 3D, taglio laser, formatura sottovuoto, lavorazione del legno, CNC e altre tecniche per costruire lo chassis e i componenti.
Ho costruito il prossimo robot nel 2009 partendo da zero, per il gruppo di robotica londinese The Aurorans. Il robot era stato chiamato EeeBot, poiché doveva essere pilotato da un portatile Eee PC. Il robot è stato successivamente dotato di un Raspberry Pi e di un kit a braccio robotico (uArm), guadagnandosi il nome ArmBot.
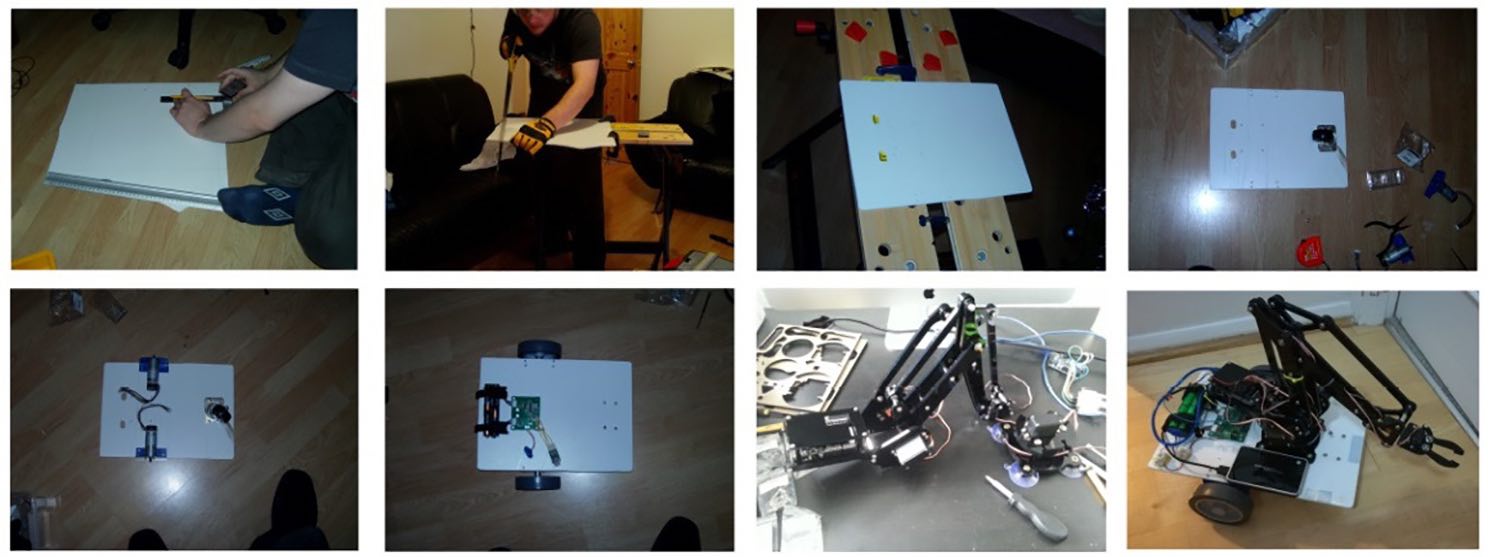
Costruzione di ArmBot.
Attualmente, sul mercato vi sono molti kit di telai e un principiante non avrà più bisogno di misurare e tagliare i materiali per realizzare un robot funzionante. Questi kit sono costruiti per sperimentare e per ispirare altri costruttori di robot e ragazzi a programmare.
La serie televisiva Robot Wars è un noto evento competitivo di robot dotati di impressionanti capacità costruttive e ingegneristiche. Tuttavia, i robot di Robot Wars non hanno un comportamento autonomo; sono controllati manualmente come auto telecomandate. Le lavatrici, sebbene meno eccitanti, sono più intelligenti, e quindi possono essere considerate più rigorosamente robot.
Questo articolo richiama contenuti dal capitolo 1 di Imparare a programmare robot.
L'autore

Iscriviti alla newsletter
Novità, promozioni e approfondimenti per imparare sempre qualcosa di nuovo

Libri che potrebbero interessarti